AKD Drive Configuration
Connection Modes
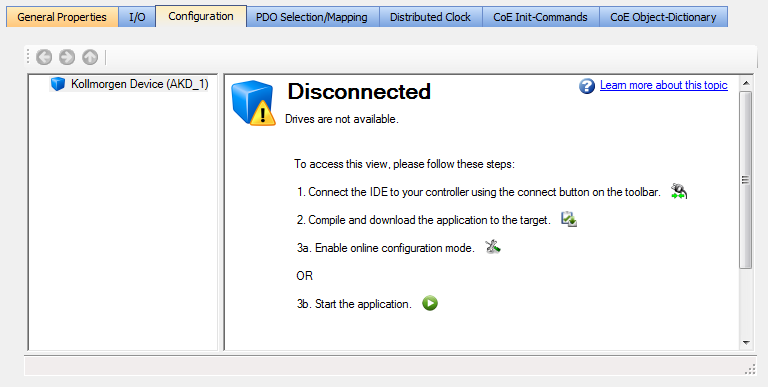
Disconnected
If the controller is not operating in one of these modes, then the AKD configurations are not accessible.
The Configuration tab indicates the AKD is Disconnected.
Online Configuration Mode
In Online Configuration mode, parameters are updated directly to the AKD or AKD2G through TelNet commands with EtherCAT in Pre-Operational mode.
When you modify the value of a parameter, a command is sent to the drive and the corresponding parameter is updated.
Project Running on the Controller
When a project is running on the controller, parameters are updated directly to the AKD with EtherCAT in Operational mode.
- When the value of a parameter is modified, a command is sent to the drive and the corresponding parameter is updated.
- Beware that your PLC application is running and can also read or write parameters to the AKD.
-
-
An AKD drive cannot be deleted while it is connected.
The AKD drive leaves Online Configuration mode and starts the application if you start an application while the drive is in that mode.
-
Before leaving Online Configuration mode (either by clicking the Online Configuration button or the Start button when the device is in Online Configuration mode), verify these conditions exist:- The drive is not enabled.
- The service motion is not enabled.
- Auto-tuning is not enabled.
- Recommendation: Click the Disable button to force this scenario.


AKD Configuration According to EtherCAT State
The drive configuration can only take place when the EtherCAT is in the Op or Pre-Op state.
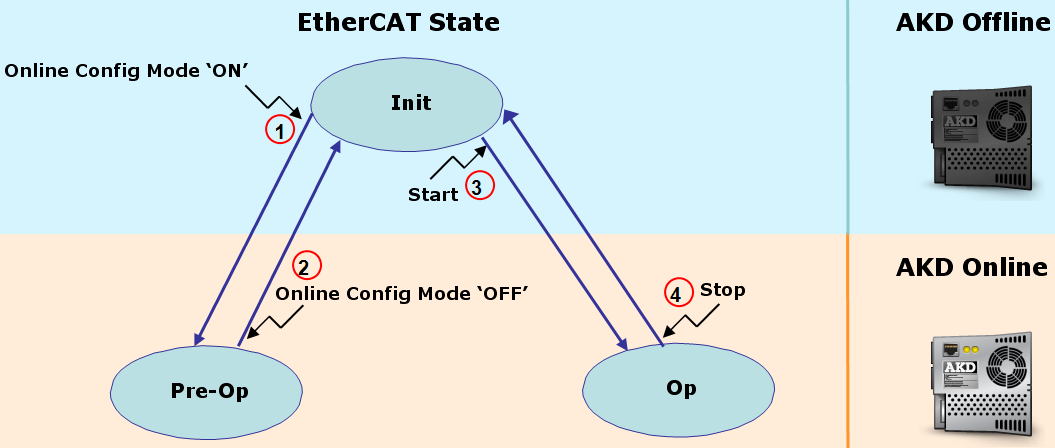
Figure 1: AKD Configuration According to EtherCAT State
|
Action |
Name |
Description |
|---|---|---|
|
1 |
Online Configuration Mode ON |
|
|
2 |
Online Configuration Mode OFF |
|
|
3 |
Start the Project |
|
|
4 |
Stop the Project |
|






